
Mechanics: Statics Kinematics 2D motionCalculus of Vector FunctionVector Function of MotionRelative in Translation Draft for Information Only
Content Kinematics: Radial Motion
Kinematics: Radial MotionIn practical engineering problems, besides describing a motion in a rectangular manner, sometimes it is convenient to resolve the component functions of the vector function of motion into components which are the radial and transverse components of the object with respect to a reference origin of the motion. Thus the study of the motion can be focused on the motion of an object along the radial direction or perpendicular to the radial direction related to a reference origin. This is also a method to specify the position of the particle, that is polar coordinates with radial coordinate and angular coordinate. Radial and Transverse Component FunctionsIn curvilinear motion, when the vector function of motion is resolved into component functions that are radial and transverse to the reference origin of motion, the orientation of the frame of reference of the object changes during the motion along the path. In other words, the frame of reference of the object is in translative and rotational motions simultaneously along the path of motion. In this case, the position of the object is more convenient to be defined by its polar coordinates r and θ instead of rectangular coordinates x and y. 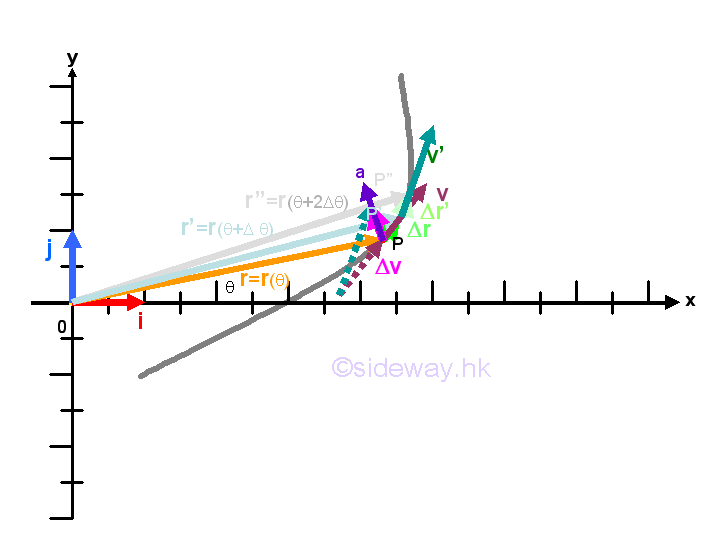
Since the velocity vector of the motion is alway tangent to the path, the vector function of the velocity vector usually have radial and transverse velocity components. Similarly the vector function of the acceleration vector also usually have both radial and transverse acceleration components such that the speed of the radial velocity vector can be accelerated by the radial component of the acceleration vector and the direction of the radial velocity vector can be accelerated by the transverse component of the acceleration vector. 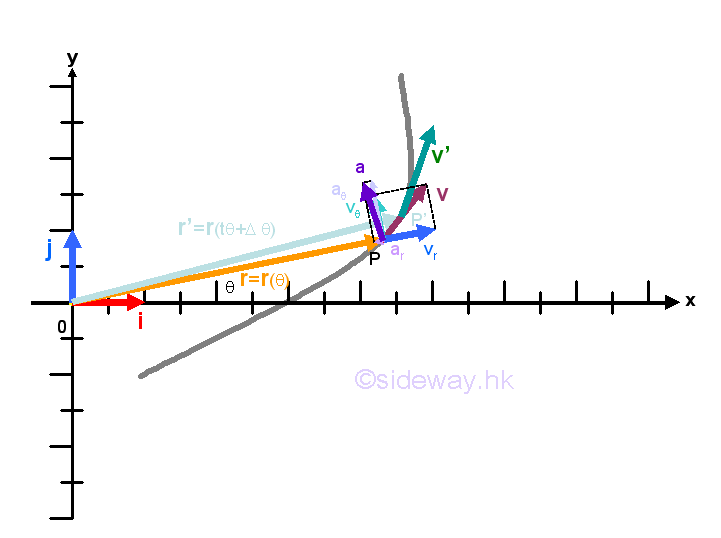
Let the unit radial vector of the velocity vector v be er and the unit transverse vector of the velocity vector v be eθ at position P with reference to the origin O. Unlike the unit vectors i and j of the fixed frame of reference, the unit vectors er and eθ are translated and rotated simultaneously along the path of the motion. Sometime the frame of reference used by the observer at the reference origin is more convenient to have the same type of frame of reference. In this case, the position of the object can also be expressed in term of the unit radial vector er and the unit transverse vector eθ also. 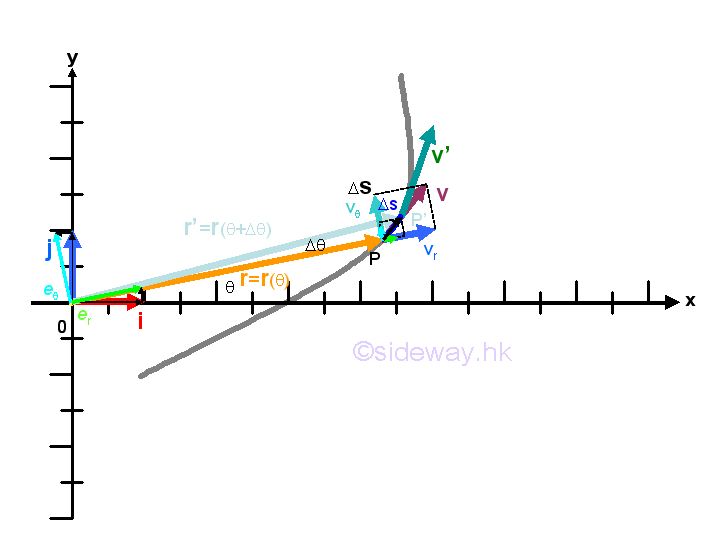
Let the motion of an object at position P is of radial distance r and an angle of θ relative to the x-axis of the fixed frame of reference at an instant of time t. The position of the object can then be expressed in term of the unit radial vector er and the unit transverse vector eθ also. Since the radial position vector of the object always aligns with the unit radial vector er, the radial position vector canbe expressed in term of the unit radial vector er only, that is rer. Geometrically both the unit radial vector er and the unit transverse vector eθ can also be expressed in term of the unit vectors i and j of the fixed frame of reference by triangle rule. Imply 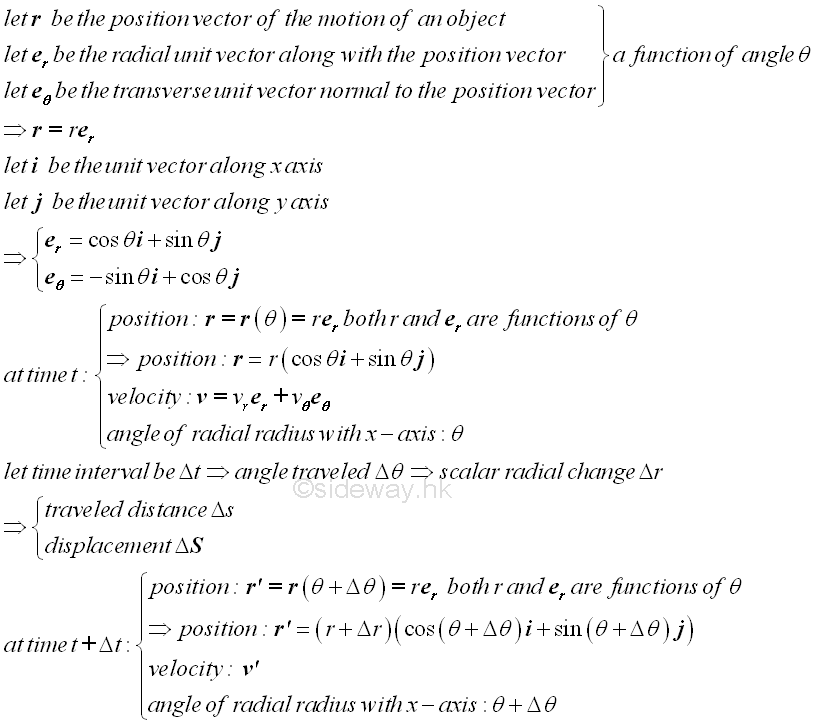
Since the motion of the object can be resolved into radial and transverse motions, the displacement, velocity and aceleration can also be resolved into radial and transverse components accordingly. However as the frame of reference of the radial and transverse components translate and rotate along with the motion, the component of the motion function cannot be obtained from the corresponding component of the change of the related motion function directly as in the fixed frame of reference because the frame of reference rotates along the path of motion besides rotating. This is because the method of vector decomposition used in the vector addition with respect to a fixed or translated frame of reference cannot be applied in the case of the addition of vectors with respect to a rotated frame of reference. 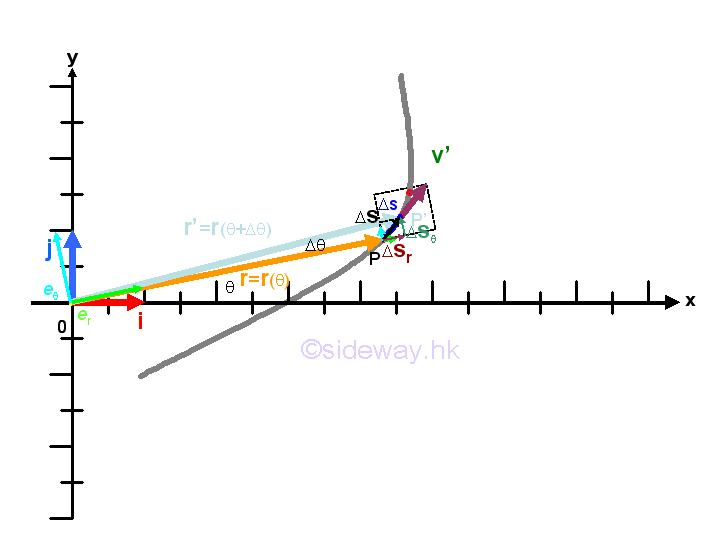
That is , the displacement of the object with radial position vector rer is equal to a displacement vector function with radial and transverse components instead of only radial component because the frame of reference of the position vector at the end of the motion at position P' is rotated with respect to the frame of reference of the displacement vector although both position vector and displacement vector have the same frame of reference at the beginning of the motion at position P. However, as the frame of reference of a velocity vector is always same as the displacement vector, the component functions of the velocity vector can be obtained directly from the corresponding components of the displacement vector. But for the acceleration vector of the motion which is similar to the case of displacement vector, 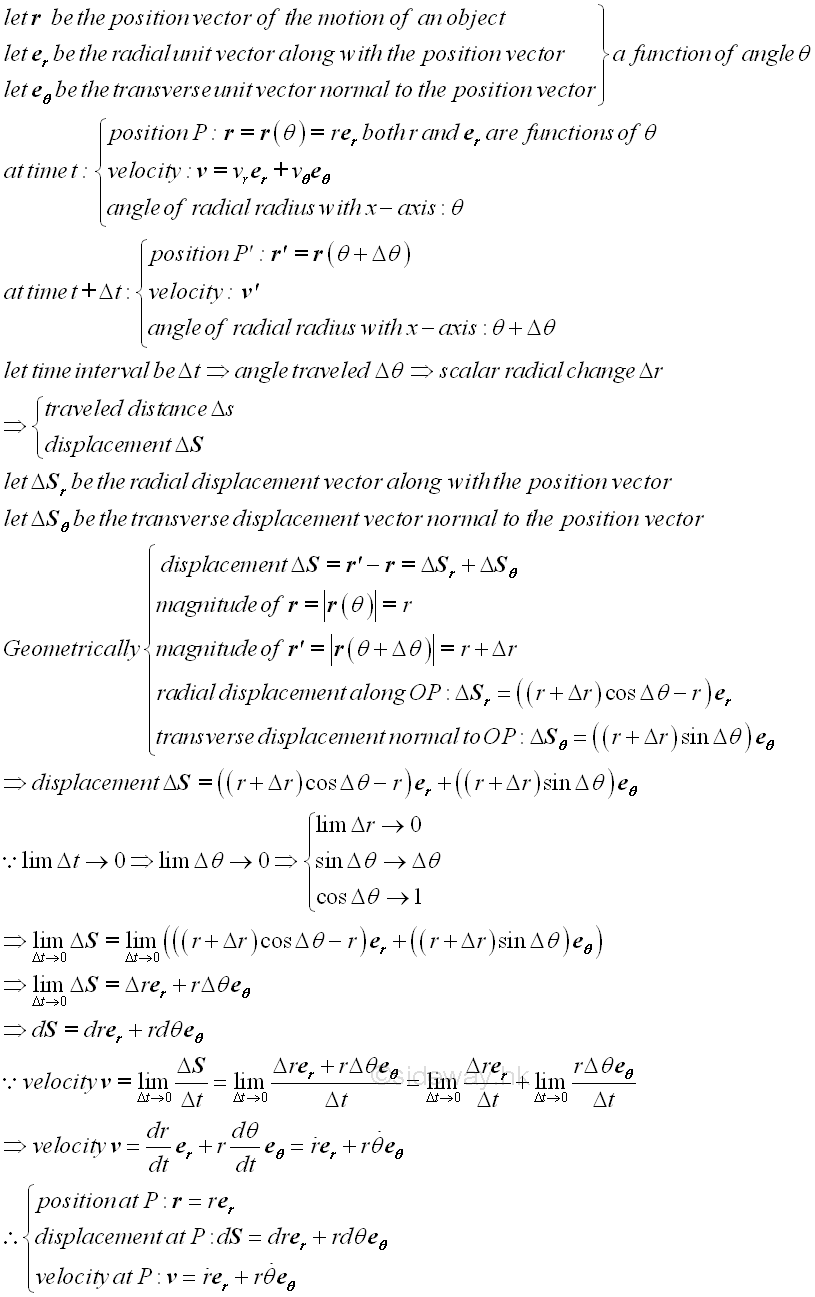
By definition, the velocity vector function of a motion is equal to the rate of change of the displacement vector function, therefore the velocity vector function of a motion can be derived from the displacement vector function directly. And by definition, the acceleration vector function of a motion is equal to the rate of change of the veclocity vector function, therefore the velocity vector function of a motion can be derived from the displacement vector function using differentiation also. Imply 
Graphically, the rate of change of a radial unit vector er with respect to the angle θ and the rate of change of a transverse unit vector eθ with respect to the angle θ are 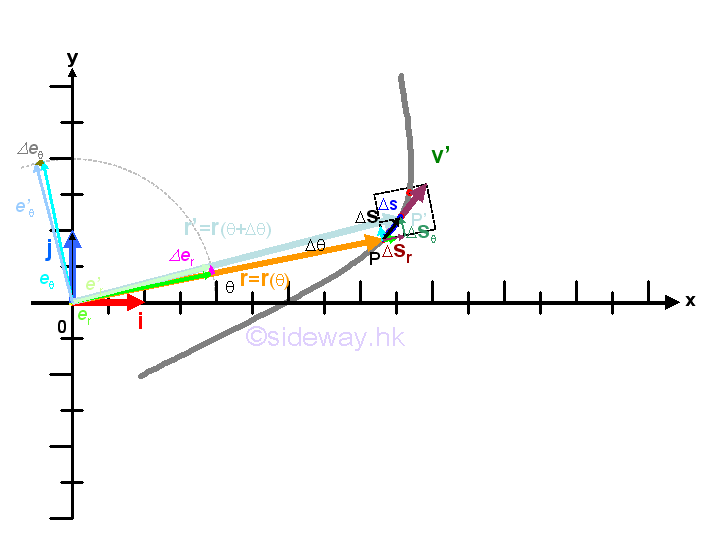
Both the changes of the radial unit vector er and the transverse unit vector eθ , Δer and Δeθ, can be obtained by vector addition as in determining the displacement vector from the position vectors. Based on the frame of reference at time t, the frame of reference rotates clockwisely by angle Δθ during the time interval Δt. Since the radial magnitudes of a radial unit vector er and a transverse unit vector eθ are always equal to a constant, the formed triangles are isosceles triangles with both Δer and Δeθ, are the base of a triangle. The rate of change of the radial unit vector er and the transverse unit vector eθ can be obtained as following using two different approaches. Imply 
Therefore the motion function of an object can be determined as following. 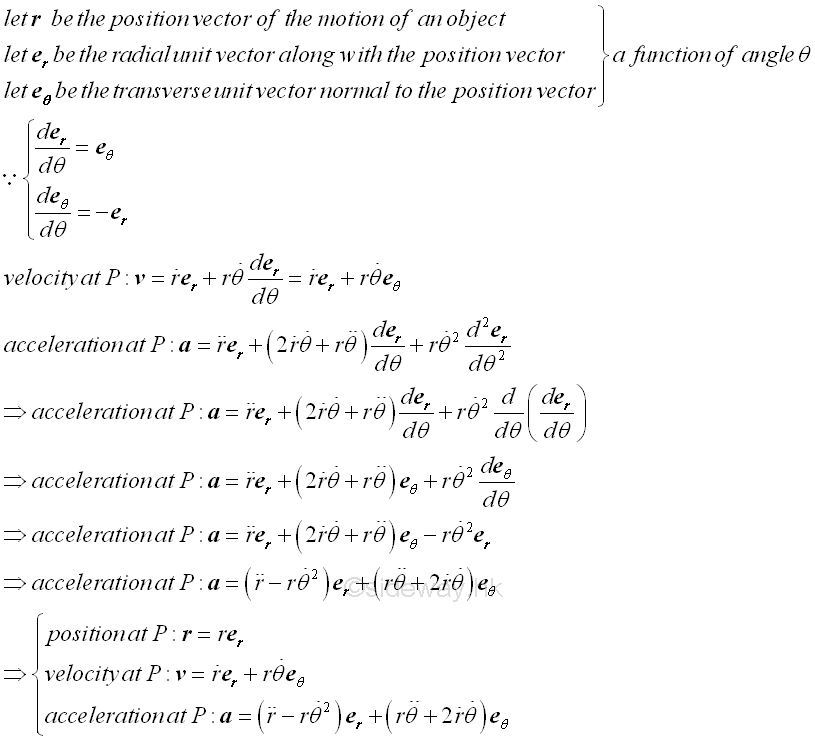
Typical Case: Circular MotionWhen an object in circular motion, moves along a circle, although the object with position vector r=rer moves along a circle, the component function r of the position vector of the motion is always equal to a constant, that is r=constant. Since r is equal to a constant, both the first derivative and the second derivative of function r are equal to zero also. And the motion functions of a circular motion are 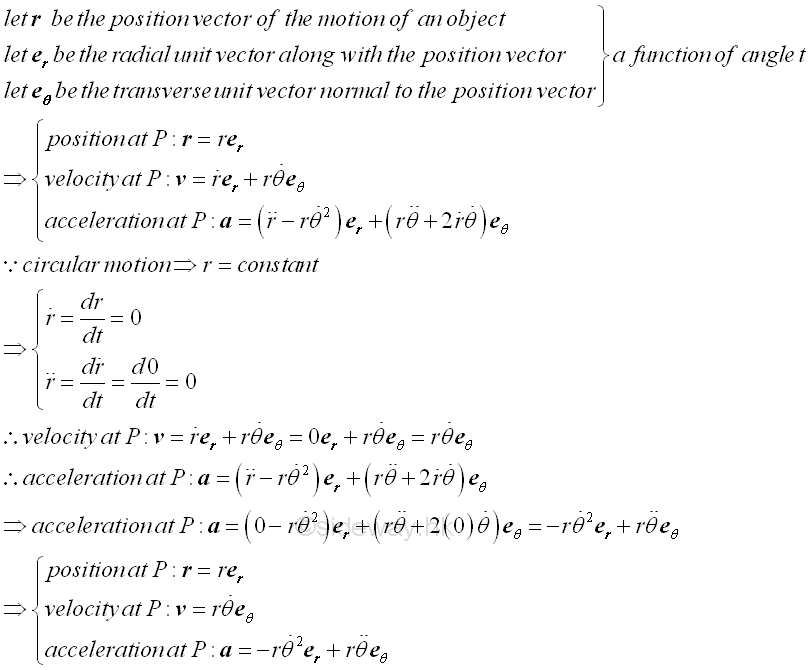
Direct Differentiation of the Radial and Transverse Unit VectorsSince both the Radial and Transverse Unit Vectors can be expressed in term of the unit vectors i and j of the fixed frame of refenece also, the derivative of the Radial and Transverse Unit Vectors can be obtained by direct differenctiation. Imply 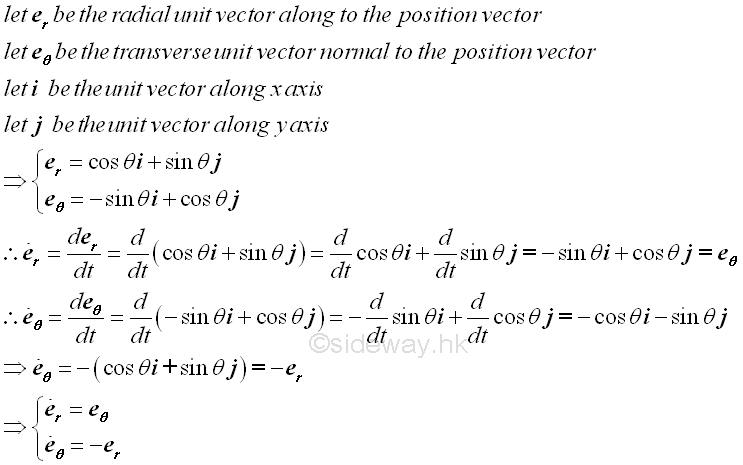
©sideway ID: 140300004 Last Updated: 3/24/2014 Revision: 0 Ref: References
Latest Updated Links
  Nu Html Checker Nu Html Checker  na na |
 Home 5 Business Management HBR 3 Information Recreation Hobbies 9 Culture Chinese 1097 English 339 Travel 41 Reference 79 Hardware 55 Computer Hardware 260 Software Application 213 Digitization 37 Latex 52 Manim 205 KB 1 Numeric 19 Programming Web 289 Unicode 504 HTML 66 CSS 65 SVG 46 ASP.NET 270 OS 431 DeskTop 7 Python 72 Knowledge Mathematics Formulas 8 Set 1 Logic 1 Algebra 84 Number Theory 206 Trigonometry 31 Geometry 34 Calculus 67 Engineering Tables 8 Mechanical Rigid Bodies Statics 92 Dynamics 37 Fluid 5 Control Acoustics 19 Natural Sciences Matter 1 Electric 27 Biology 1 |
Copyright © 2000-2026 Sideway . All rights reserved Disclaimers last modified on 06 September 2019