TOCForceMomentCouple Draft for Information Only
ContentForce-Couple system Reduction
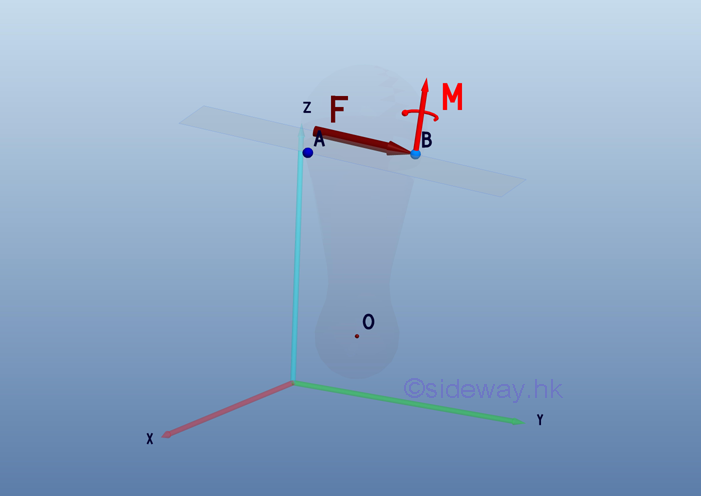
Force-Couple system ReductionThe couple vector M or moment vector M of a force-couple system transformed from a force vector F is always prependicular to the force vector F.
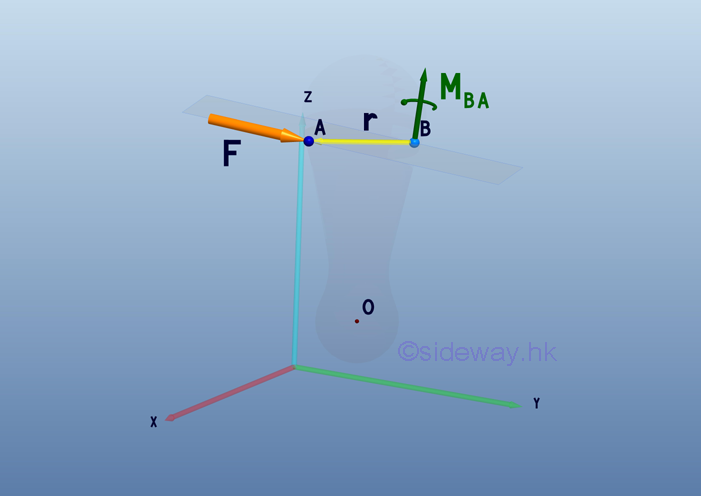
Since the same resultant force vector on the rigid body must remain underchange, the equivalent force vector F should have the same magnitude and direction as the original force vector F. In order to create the equivalent moment effect at point B, the force F should move on a plane which passes through the force vector F or point B and is normal to the couple vector until the moment MAB of force F about B is equal to the moment of the couple vector Mc.
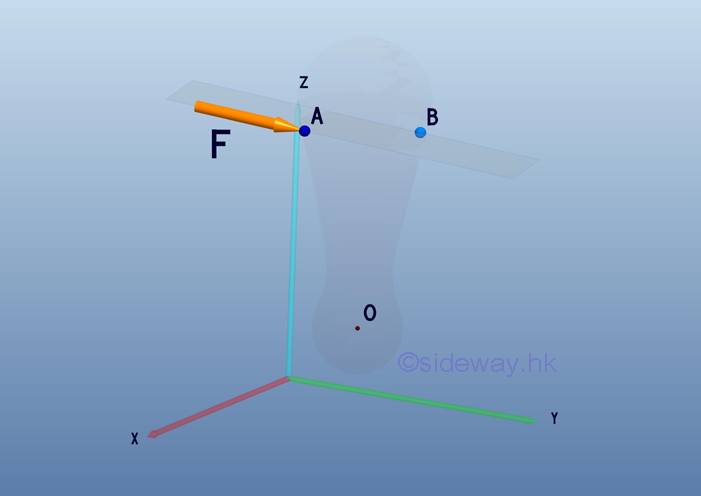
Therefore a force-couple system applying at an arbitary point B with a force vector F and a couple vector Mc which is normal to the force vector F can be reduced to one single equivalent force vector F applying at point A on the rigid body.
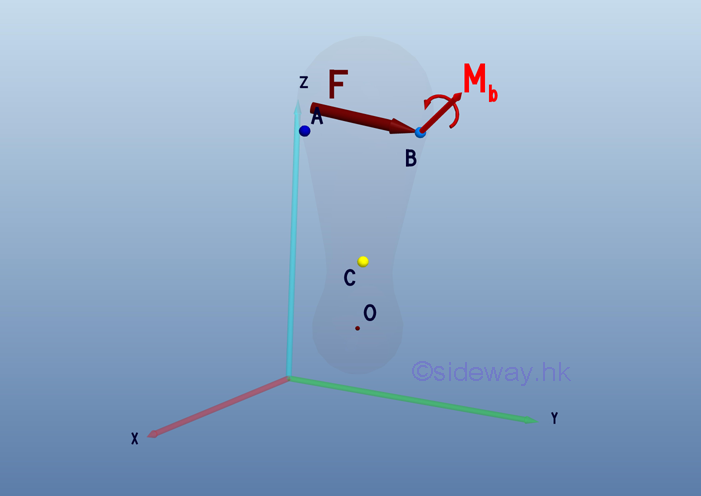
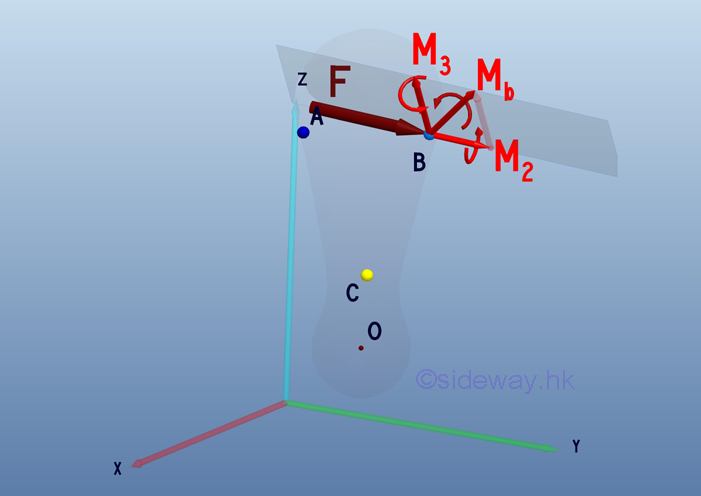
Force-Couple system ConversionHowever in general, a force-couple system usually consists force vector F and couple vector Mb which are which are not prependicular to each other. Because the force vector F is not prependicular to the couple vector Mb, the couple vector Mb cannot be replaced by the memont created by the force vector F.
But the force-couple system can be converted to a simpler one by couple decomposition. the couple vector Mb can be decomposed into couple vector M2 along the direction of force vector F and M3 normal to the force vector F ,on a plane which consists both the force vector F and couple vector Mb. .
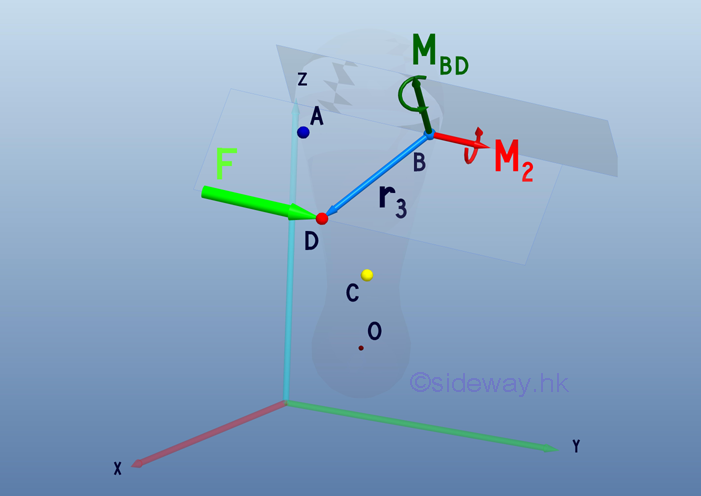
Since couple vector M3 is normal to the force vector F, couple vector M3 can be replaced by moving the force vector F on a plane which passes through the force vector F or point B and is normal to the couple vector M3 until the moment MBD of force F about B is equal to the moment of the couple vector M3 as before.
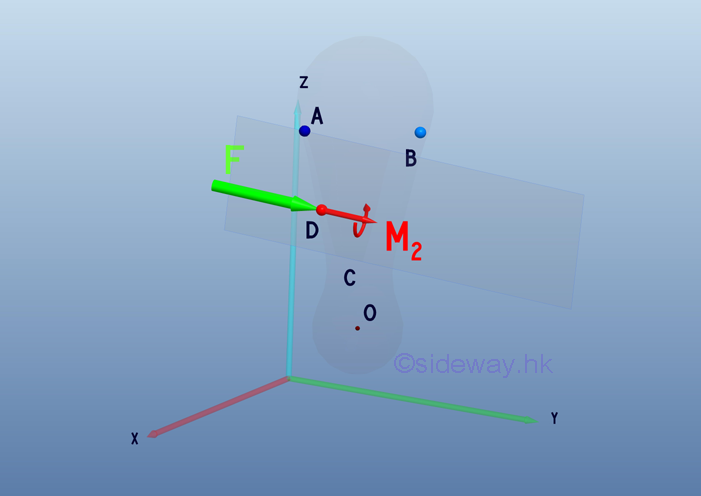
Since the couple vector M2 is a free vector, it can also be moved to point D for convenience. And the equivalent system of a force-couple system is converted to a force vector F and a couple vector M2 along with the force vector direction named as wrench.
©sideway ID: 110700012 Last Updated: 7/11/2011 Revision: 0 Ref: References
Latest Updated Links
  Nu Html Checker Nu Html Checker  na na |
 Home 5 Business Management HBR 3 Information Recreation Hobbies 9 Culture Chinese 1097 English 339 Travel 45 Reference 79 Hardware 55 Computer Hardware 263 Software Application 213 Digitization 37 Latex 52 Manim 205 KB 1 Numeric 19 Programming Web 289 Unicode 504 HTML 66 CSS 65 SVG 46 ASP.NET 270 OS 431 DeskTop 7 Python 72 Knowledge Mathematics Formulas 8 Set 1 Logic 1 Algebra 84 Number Theory 206 Trigonometry 31 Geometry 34 Calculus 67 Engineering Tables 8 Mechanical Rigid Bodies Statics 92 Dynamics 37 Fluid 5 Control Acoustics 19 Natural Sciences Matter 1 Electric 27 Biology 1 |
Copyright © 2000-2026 Sideway . All rights reserved Disclaimers last modified on 06 September 2019