
TOCForceMomentCoupleSystem of ForcesStatic Equilibrium Draft for Information Only
Content
Simple
Planar Truss
Simple Planar TrussDetermination of Forces in Trusses :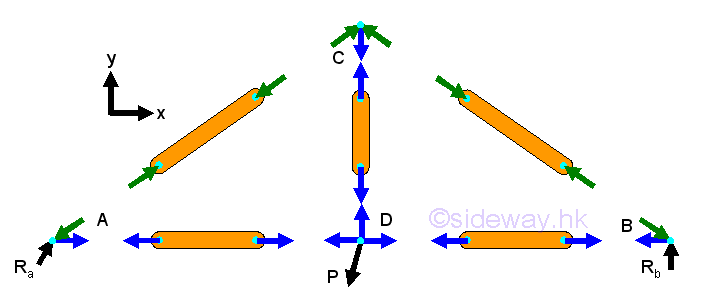
Eight equations with eight unknowns imply the forces in the truss is statically determinate. There are a number of way to determine forces in trusses by the method of joints. Solving Equilibrium Equations:In general the eight equilibrium equations can be solved mathematically. The eight equilibrium equations can be divided into two groups, i.e. with external reactions and without external reaction. Imply 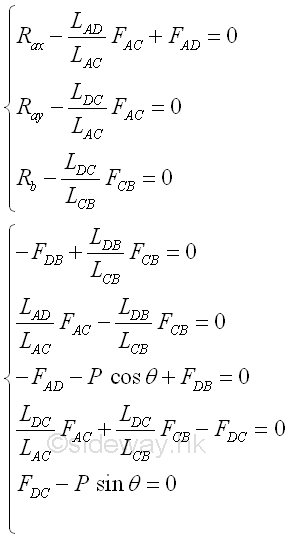
Focusing on the group without external reaction, five equations with five unknowns imply the forces in the truss member can be determinated. 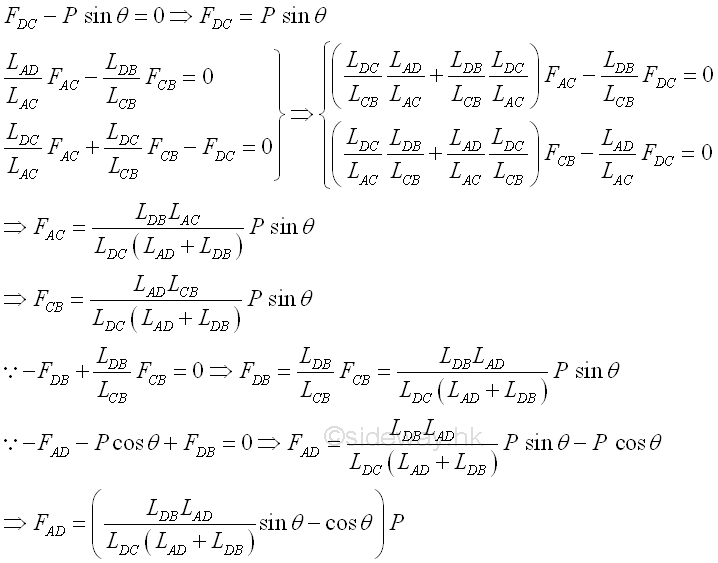
The external reaction can then be determined. Imply 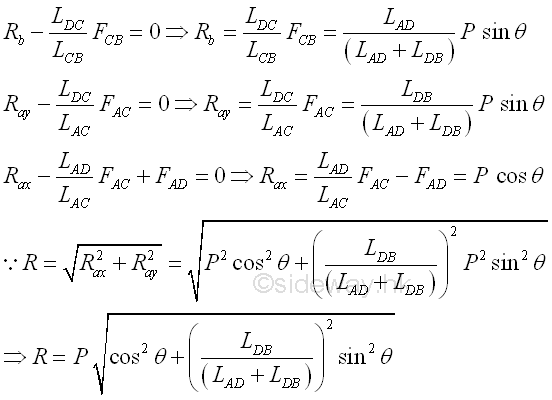
Solving Static Equilibrium:Or unknown forces can also be determined by making use of the mechanical static equilibrium state. When the completely constrained truss is in static equilibrium, all the unknown reactions can be determined. Imply 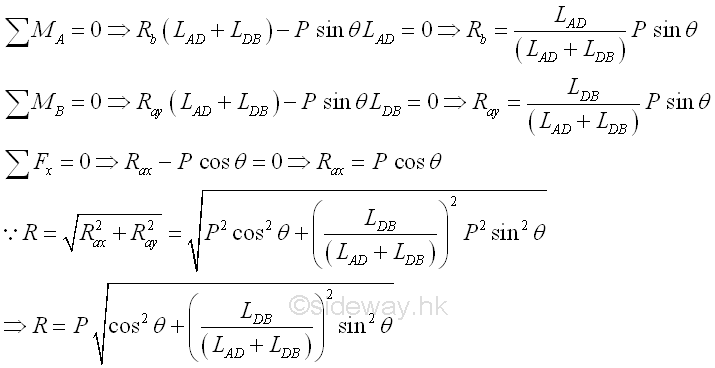
Since a simple truss is constructed by adding two truss members to form a new joint, in general, a joint involving two unknown forces from two truss members can always be found. For a statically determinate truss, the unknown forces in the truss can always be determined by the static equilibrium of the joint pin connecting to two truss members. Therefore starting with a joint with two truss members, i.e. joint pin A. Imply 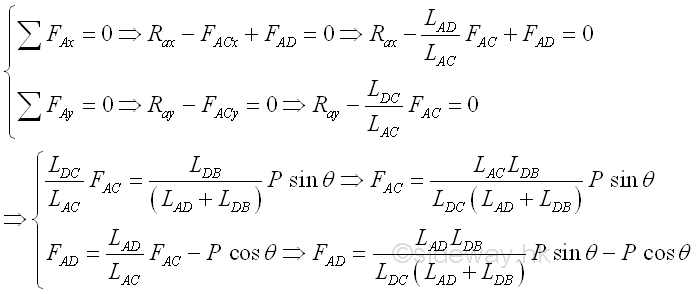
After two unknowns are determined, the unknowns of the two neighborhood joints will be reduced by one. Applying the same strategy to select neighborhood joints with two unknowns, i.e. joint pin D. Imply 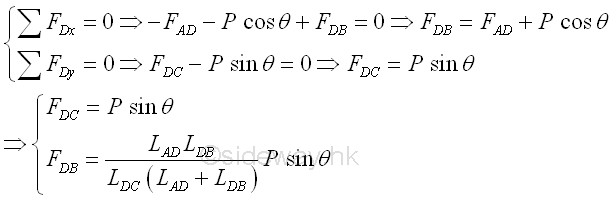
Repeating the procedure untill all unknown are determined. All possible joints with two unknowns i.e. joint pins B and C can be used. It can be either to continue selecting the neighborhood joint or to start with other possible joint from other ends. Use joint C, Imply 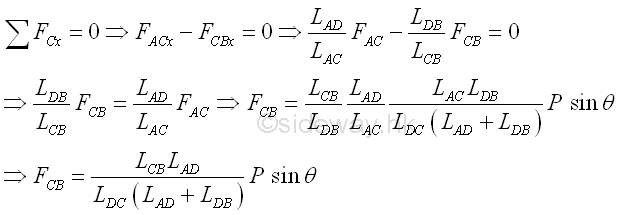
Solving Force Vector Diagram:Sometimes, the unkonwn forces can be determined using graphical methods through the determination of force vector by constructing the force vector diagram at each joint. Starting the joint pin with known force, so that all force vector diagram can be scaled to a known value, i.e joint pin D, Although joint pin D is constained in y dimension only, joint pin D is still a good choice. Besides the equilibrium force vector diagram should always be draw in one direction for all joint pins, i.e. counter-clockwise direction imply 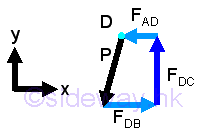
Continuing the joint pin with known dimension, which is fully constrained by the known force before so that all force vector diagram can be scaled to a known value, i.e joint pin C, imply 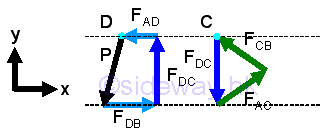
Continuing the joint pin with known dimension, which is fully constrained by the known force before so that all force vector diagram can be scaled to a known value, i.e joint pin B. The vector diagram of Joint pin A is not fully constrained because the unknown reaction R is a vector of two rectangular components. imply 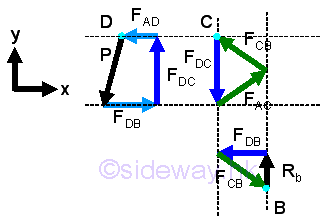
Since FDB is constrained, the unconstrained force vectors at point D can be fixed also. imply 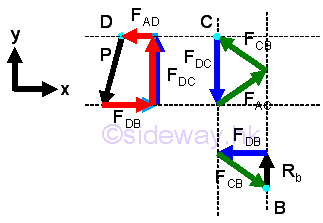
Continuing the joint pin with known dimension, which is fully constrained by the known force before so that all force vector diagram can be scaled to a known value, i.e joint pin A. imply 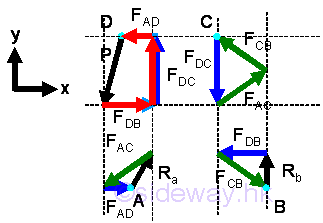
The force vector diagtram can be joined to form a single diagram, known as Maxwell's diagram. This single diagram can give a more general idea on the characteristic of the trusses, imply 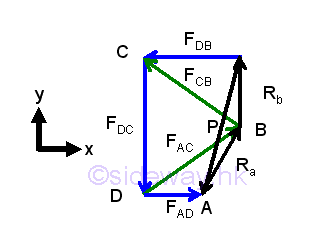
©sideway ID: 120200072 Last Updated: 2/26/2012 Revision: 0 Ref: References
Latest Updated Links
  Nu Html Checker Nu Html Checker  na na |
 Home 5 Business Management HBR 3 Information Recreation Hobbies 9 Culture Chinese 1097 English 339 Travel 45 Reference 79 Hardware 55 Computer Hardware 263 Software Application 213 Digitization 37 Latex 52 Manim 205 KB 1 Numeric 19 Programming Web 289 Unicode 504 HTML 66 CSS 65 SVG 46 ASP.NET 270 OS 431 DeskTop 7 Python 72 Knowledge Mathematics Formulas 8 Set 1 Logic 1 Algebra 84 Number Theory 206 Trigonometry 31 Geometry 34 Calculus 67 Engineering Tables 8 Mechanical Rigid Bodies Statics 92 Dynamics 37 Fluid 5 Control Acoustics 19 Natural Sciences Matter 1 Electric 27 Biology 1 |
Copyright © 2000-2026 Sideway . All rights reserved Disclaimers last modified on 06 September 2019