
TOCForceMomentCoupleSystem of ForcesStatic EquilibriumStructure Analysis 2D Plane Body Center of Gravity, Center of Mass, & CentroidFirst Moment of 3D Body Draft for Information Only
Content
Centroid of 3D Body
Centroid of 3D BodyThe centroid of 3D Body is determined by the first moment of a three dimensional body with the method of the first moment of volume. 
Centroids of VolumesVolume by IntegrationVolume by Triple Integration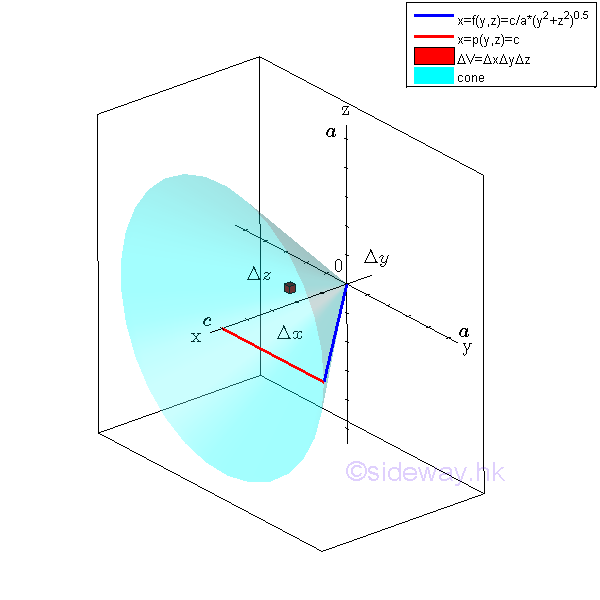
For example, the signed volume of the 3D region U is bounded by surfaces in rectangular form , Imply 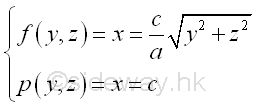
An elemental volume ΔV in rectangular form can be defined as Δx times Δy times Gz. Imply 
Therefore the volume of the solid cone U in cartesian coordinates xyz is equal to 
In general, the volume of a region can be determined by multiple integration through sweeping the signed elemental volume starting from along any one of the rectangular coordinate axes. Imply Starting from horizontal sweeping along x axis 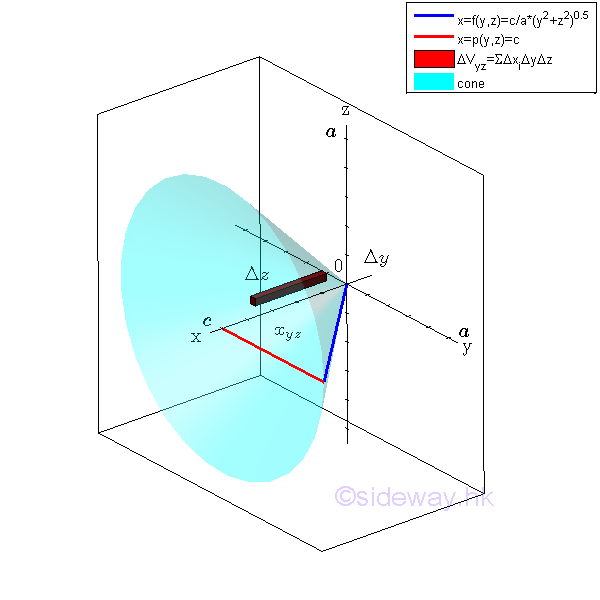
Considering an elemental volume along x axis. Imply 
All elemental volumes can be bounded by curves in the plane yz. And the curves is 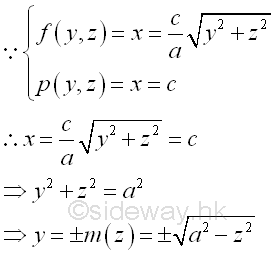
Similarly sweeping the elemental volume ΔVyz along y axis horizontally. 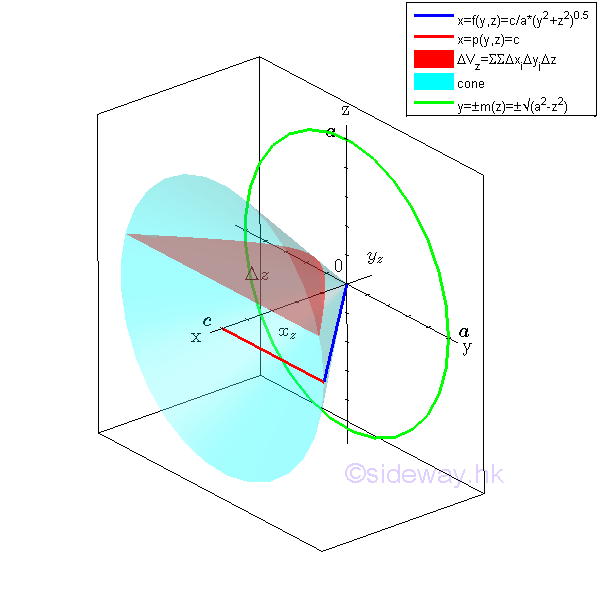
Considering an elemental volume ΔVz along y axis. Imply 
Since the bounding curves are joined at plane zx, The bounds of the bounding curves are 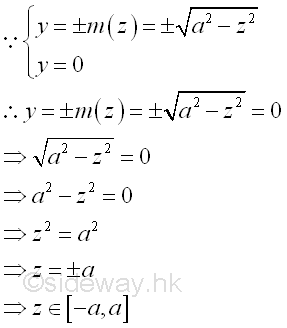
Therefore the volume of the solid cone U is 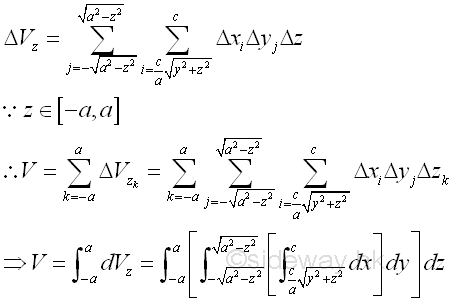
The volume of the solid cone U can also be determined starting from other axis. Starting from horizontal sweeping along y axis 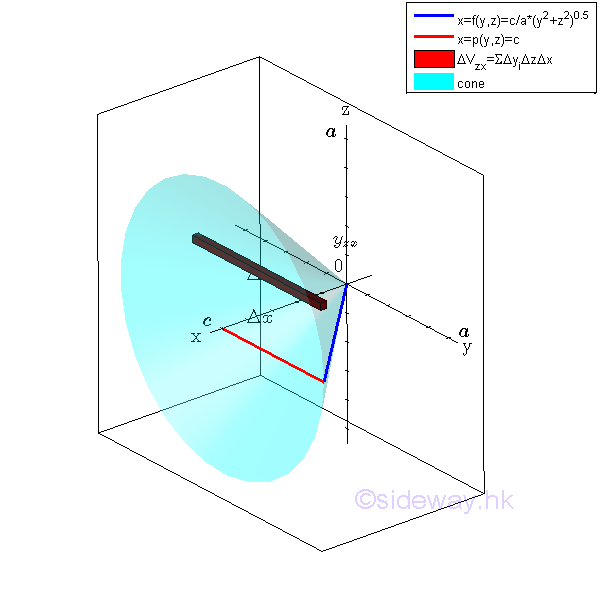
Considering an elemental volume along y axis. Imply 
All elemental volumes in z direction can be bounded by curves in the plane zx. And the curves is 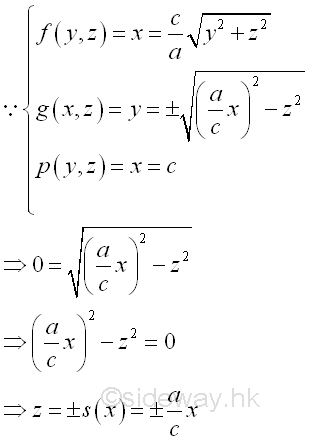
Similarly sweeping the elemental volume ΔVzx along z axis vertically. 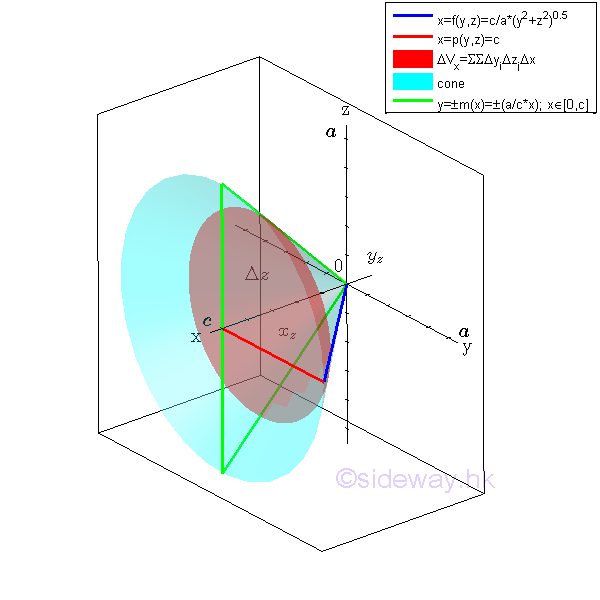
Considering an elemental volume ΔVx along z axis. Imply 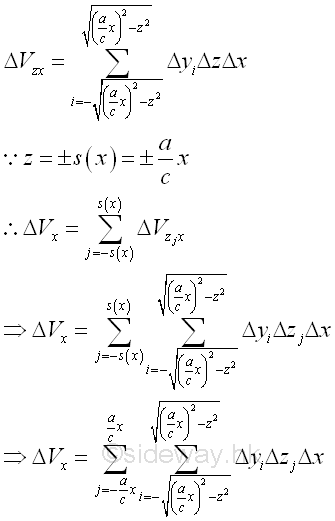
The bounding curves in x direction can also be bounded at plane zx. The bounds of the bounding curves are 
The volume of the solid cone U can be expressed as 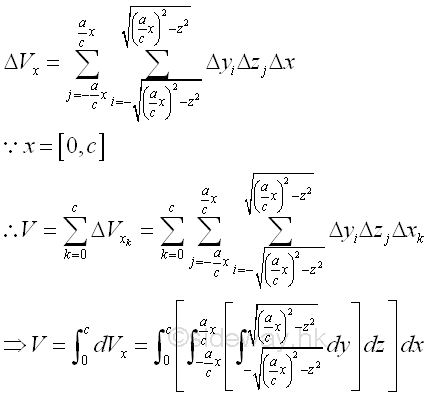
Therefore the volume of the solid cone U is 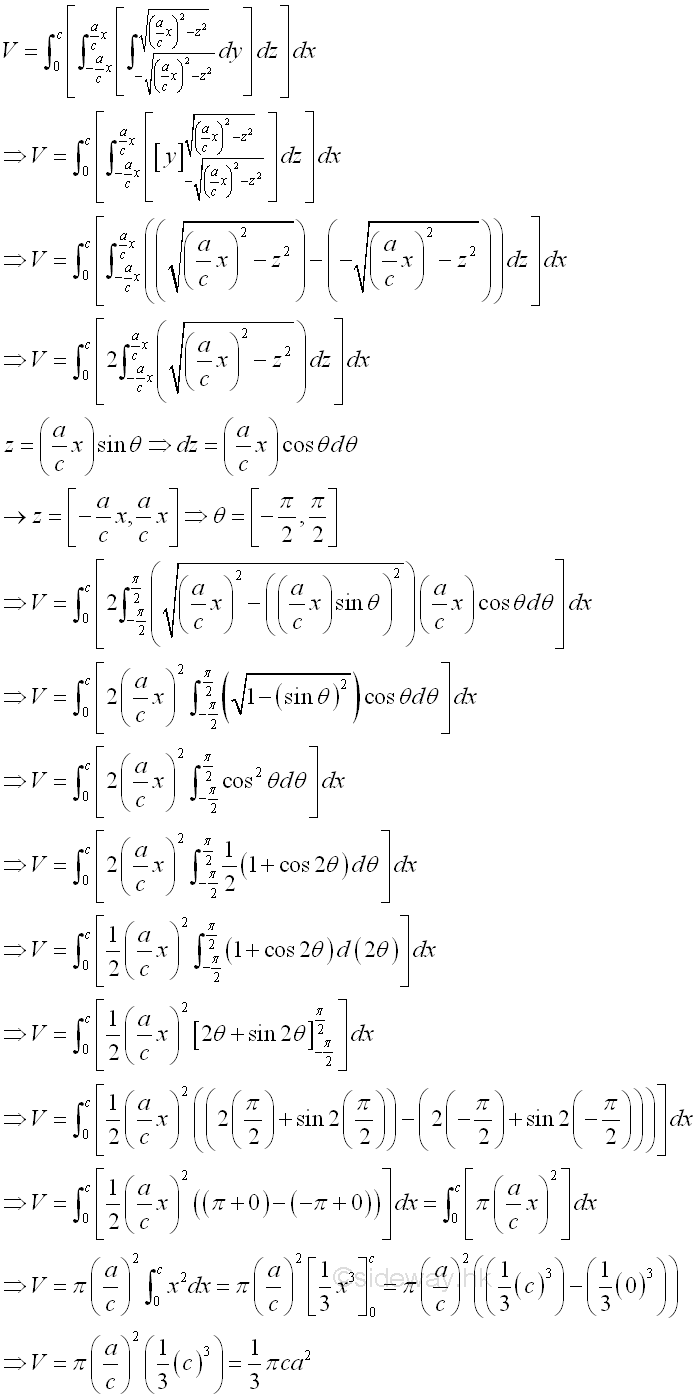
©sideway ID: 120600011 Last Updated: 6/21/2012 Revision: 0 Ref: References
Latest Updated Links
  Nu Html Checker Nu Html Checker  na na |
 Home 5 Business Management HBR 3 Information Recreation Hobbies 9 Culture Chinese 1097 English 339 Travel 45 Reference 79 Hardware 55 Computer Hardware 261 Software Application 213 Digitization 37 Latex 52 Manim 205 KB 1 Numeric 19 Programming Web 289 Unicode 504 HTML 66 CSS 65 SVG 46 ASP.NET 270 OS 431 DeskTop 7 Python 72 Knowledge Mathematics Formulas 8 Set 1 Logic 1 Algebra 84 Number Theory 206 Trigonometry 31 Geometry 34 Calculus 67 Engineering Tables 8 Mechanical Rigid Bodies Statics 92 Dynamics 37 Fluid 5 Control Acoustics 19 Natural Sciences Matter 1 Electric 27 Biology 1 |
Copyright © 2000-2026 Sideway . All rights reserved Disclaimers last modified on 06 September 2019